科艺仪(yí)器提供基于TOF, FMCW 及FLASH技术的2D,3D激光雷达,以满足不同应用的移动(dòng)机器人及AI的开发需求。同时,我(wǒ)们也提供连续稳定输出位姿信息的位算单元,助(zhù)力泛移动机器人系统敏捷开发。
中德睿博 - 助力泛(fàn)移动机器人系统敏捷开发
基于底层的多传感器时间同步架构及多源(yuán)数据技术,中德睿(ruì)博为不同需求的客(kè)户提供全场景定位的模块化标准产品(pǐn),包含:
- •L系列(liè)-持续稳定输出位置信息的全源融合位算单元LCU
- •N系列-适用于不同(tóng)类型(xíng)移动机器人的系(xì)列化导(dǎo)航专用工控机NIPC
- •S系列-可以即插(chā)即用的(de)全源时空(kōng)融合敏捷开发平台 SLAM
欧镭激光- 2D、3D ToF 激光雷达
欧镭激光提供面向工业和商业移动机器人的导航(háng)定位和避障用1D,2D,3D激光雷达。
摩尔芯光 - FMCW 激光雷达
拥有自有知识产(chǎn)权的(de)光子集成技术,致力于研(yán)发和生产基于硅光技术的激光雷达(LiDAR)芯片及系统,并专注于(yú)下一代 FMCW 技术路线(xiàn)的激光雷达的整机开发及量产。
芯探 - Flash 激光(guāng)雷达(dá)
芯探的Flash激(jī)光雷达具备测距能(néng)力长、抗干扰能力强、适合大规模量产等优势,可以将更高效的(de)感知能力赋予车辆、机器人(rén)、物联网、安防等行业。
苏州中德睿博智(zhì)能(néng)科技有限公司(Sino-German Robooster Intelligent Technology Co. Ltd)
由机器人(rén)与导航定(dìng)位(wèi)专业(yè)的留德博士于2015年创立,秉承“严(yán)谨、耐心、专业、精(jīng)益求精”的工匠精神,以“让人工智能‘慧’眼识途”为愿景,立志做全(quán)球的全场景定位解决方案供应商。团队深耕移动机器人及自主移动解决方(fāng)案多年,专注于多传感器信息(xī)融合、全源(yuán)融合定位、即时成图与定位(SLAM)、移动载体运动测量等领域,集行业认知、核心技(jì)术、批量生产、供(gòng)应链优(yōu)势于一身。
公司的(de)主要产品包含:
时间同步器(RS-TS5)

RS-TS5可基于外部1PPS 或者内部时钟,实(shí)现8通道的同步触发信号生成。8个通道之间、8个通道与外(wài)部 1PPS之间(jiān)的同步精度达到µs级,当(dāng)外部 1PPS 无效时,可自动切(qiē)换为外部基准。8个通(tōng)道参数可通过串口单独配置,配置参数包括输出频率、输出占空比和输出有(yǒu)效电平。
特点:
- • 同步精度高、同(tóng)步延迟小
- • 输入输出脉冲参数通串口可调
- • 同时支持八路信号同步
- • 同时支持内部、外部脉冲触发,无外部脉冲时自动(dòng)切换(huàn)内部脉冲触发(fā)
- • 低频率误差,误(wù)差不大于 10PPM
- • 同步精度优于(yú) 5us
组合导航(háng)及外同步模块与组合导航基站(RS-INTS1、RS-INTB1)

RS-INTS1组合(hé)导航及(jí)外同步模块内部集成双天线差分GNSS模块、3轴陀螺(luó)、3轴加(jiā)速度计、3轴磁强计以及气压计,内部传感器采样时严格与1PPS 同步,同时将GNSS 的1PPS 作为输入,可以根据用户配置的频率,生成并输出与1PPS同步的最多(duō)6路同步信号,用来给用户的其他设备提(tí)供触发(fā)信号,6 路(lù)同步信号的频率、占空比(bǐ)等均单独可配置。组合导航及外同步模块内部集成4G模块,与(yǔ)RS-INTB1组(zǔ)合导(dǎo)航基站模块配对使用,上电(diàn)自动与组合导航基站模块通信,实现(xiàn)上电即可高精(jīng)度 RTK 定位。双天线差分 GNSS 模块同时可为用户提供高精度的方位输出。RS-INTS1亦(yì)支持千寻数据(jù)的RTK,无需(xū)复杂操作(zuò),客户端输入千(qiān)寻账号后,即可一(yī)键RTK。
特点:
- • 内部集成双天线(xiàn)差分 GNSS 模块
- • 内部集成高性能 MEMS-IMU
- • 内部(bù)集成 3 轴磁强计(jì)和气压计(jì)
- • 内部传感器数据采集完全与 1PPS 同步
- • 6 通道(dào)同步触发信号输出
- • 同步(bù)信号(hào)的频率、触发(fā)偏移、有效电平、占空比等参(cān)数可独立配置
- • 外部秒脉冲 / 内部秒脉冲模式
- • 提供 ROS 驱(qū)动
多(duō)源融合同步(bù)采集(jí)设备(RS-SLAMBase/RS-SLAMBasePro)
SLAM Base多源融合同步(bù)采集设备采用高性能ARM多(duō)核处理器,内部集成双天线差分GNSS模块(kuài)、3轴陀螺、3轴MEMS加速度计、3轴磁(cí)强计以及气压(yā)计,内部传感器采样与1PPS同步,同(tóng)时将GNSS的1PPS作为输入(rù),可以(yǐ)根据用户配置的频率,生成(chéng)并输(shū)出与1PPS同步的最多4路同步信号,用来给用户的其他传感器提供触发信号,是SLAM及三维(wéi)维重构研究的理(lǐ)想同步采集平台。
特(tè)点(diǎn):
- • 所有传感(gǎn)器数据通过 1PPS 信号进行硬同步,即使在没有 GNSS 信号下也能通过内置触发信号进行同(tóng)步
- • 基站差分数据或者千寻数据输入(rù),实现双天线 RTK 定位
- • 4通道同步触(chù)发信号输出,可触发用户配置的其(qí)他传感器
- • 同步信(xìn)号的频率、触发偏移、有效电平、占空比等参数可独立配置
- • 集成4G通讯,一键RTK定位(选配配(pèi)对基站)
多源融合定位与建图装置(RS-SLAMPlus/RS-SLAMPlusPro)

SLAM Plus全源融合定位建图设备是一款高(gāo)度集(jí)成(chéng)的(de)高性能感(gǎn)知(zhī)设备,融合(hé)了先进的传感器技术和时间同(tóng)步机制(zhì)。该设备内部集(jí)成四目环视相机(jī)、激光雷达、双天线差(chà)分(fèn)GNSS模块、3轴陀螺、3轴MEMS加(jiā)速度(dù)计(jì)、3轴磁强计以及气压(yā)计,内部传感器采样严(yán)格(gé)与1PPS(Pulse Per Second)同步,所有传感器数据采用ROS节点方式输出(chū),所有数据接(jiē)口均采用带锁扣连接器,更(gèng)适(shì)合移动载体。SLAM Plus为多传感器融合、SLAM、测绘三维(wéi)建模及全源融合(hé)导航研(yán)究者提供了一个强大即插即用的解决方案(àn),是当今头(tóu)部的(de)感知测(cè)量和全源融合导航开发平台(tái)。
特点(diǎn):
- • 内部集成多线激光雷达
- • 内部集成4目环视相机;
- • 内部集成双天线差分GNSS模块;
- • 内部集成高(gāo)性能MEMS-IMU;
- • 内部(bù)集成3轴磁强计和气压计;
- • 内部传感器数据采集完全与1PPS同步;
- • 输出同步采集的所有传感器(qì)原始数(shù)据;
- • 集成4G通讯,一键RTK定位(选配配对基站)

简介:
- ● 欧镭激光(guāng)于2016年在杭州成(chéng)立,隶属杭州巨星科技(002444);在巨星科技担当光电核心器件的设计、研发(fā)和制造的(de)角色;
- ● OLEI拥有90多名拥有光、机、电及测量(liàng)测绘仪(yí)器行业经验的专业成员;其中包含一支成熟稳定的制(zhì)造团队。

产品:
欧镭(léi)激光提供面向工业和商业移动机器人的导航定位和避(bì)障用(yòng)1D,2D,3D激光雷达。
A090/A200 1D激光测距传感器

特点:
- ● 长量程(chéng):0.05-90/200m(自然目标)2个版本可选
- ● 高(gāo)精度:±1.5mm
- ● 高分辨率(lǜ):0.1mm
- ● 高速度:最(zuì)高(gāo)30Hz
- ● 抗强光:<30klux
- ● 接口丰富:RS485,CAN,模拟量、1路开关量输入、2路开关量输出
- ● 工作温度:-20~+55℃
应用:
- ● 集装箱定位(wèi)
- ● 定位(wèi)小推车和平移车(chē)
- ● 大型工件装(zhuāng)配定位
- ● 材料切割过程中的长度测量
- ● 起重机/龙门吊的碰撞保(bǎo)护
- ● 江河湖(hú)海的(de)水位测量
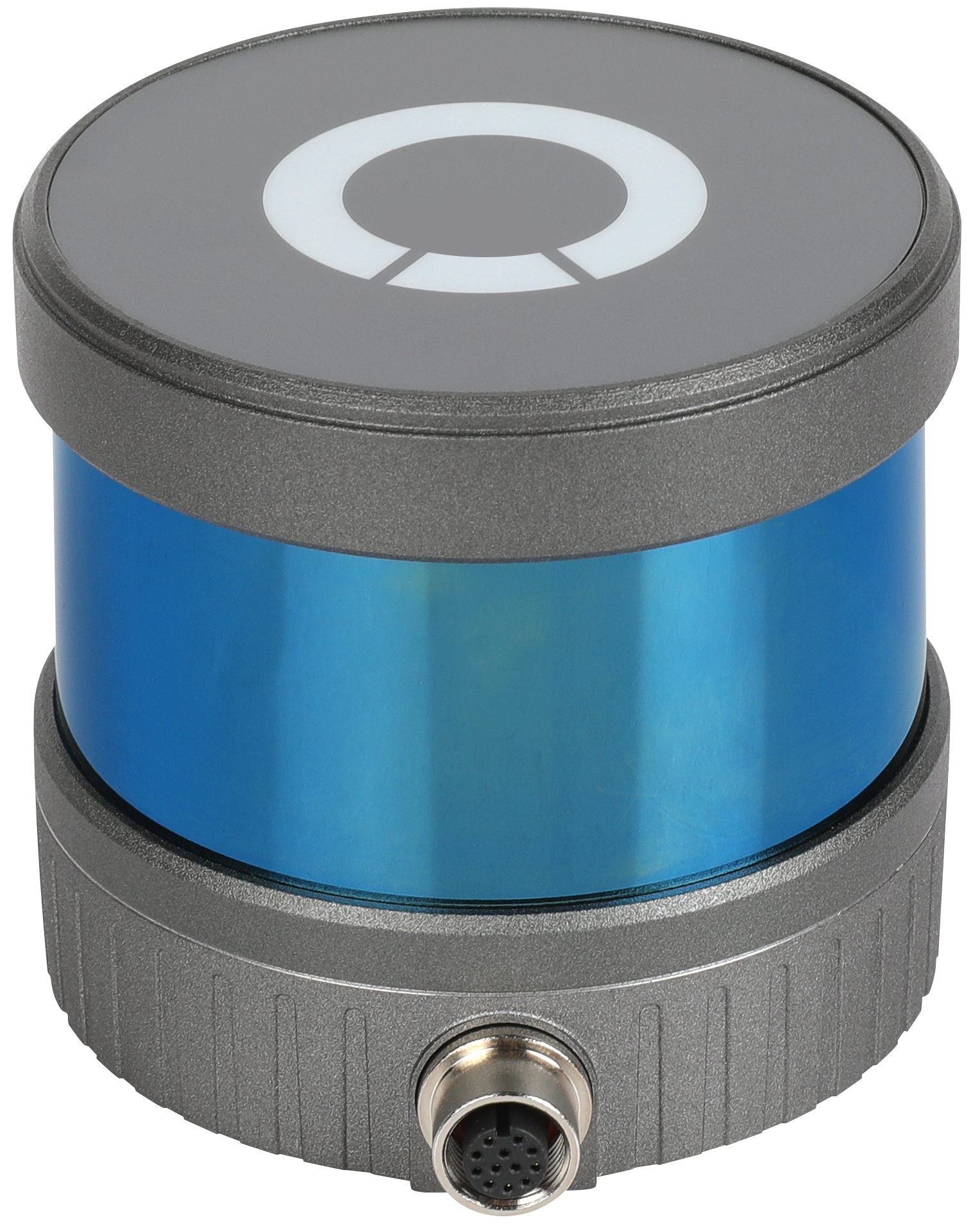
LR-1BS2 2D激光雷达(dá)传感(gǎn)器

特点:
- ● 适用于安全避障及区域防护
- ● 探测能(néng)力(lì)可达20m@(R=80%)
- ● 开关量推挽输出,同时兼带点云数据(可单控PLC也可(kě)做点云避障策略)
- ● 扫描能力:视场角(水平(píng))270°;0.225°固定角分辨率
- ● ±0.5°水平面误差,确保水平扫(sǎo)描距离
- ● 可自(zì)由设(shè)置安全区域(yù),最多16个BANK
- ● 标准出(chū)线侧面,其他方式可选
- ● 提供ROS驱动
- ● 认证:FCC,EMC,CE,RoHS,REACH,FDA
- ● 防护等级:IP66
应用:
 |
|
 |
|
 |
|
 |
| 自主移动机器人AMR |
|
工业自动化 |
|
主(zhǔ)动安全监控 |
|
智能物流(liú) |
|
LR-1BS5 2D激光雷达传感器

特点(diǎn):
- ● 适用于SLAM导航(háng)以及点云避障策略
- ● 测距能力:25m@(R=80%),30m可选
- ● 扫描范围:视场角(水平)270°,0.225°固定角分辨率
- ● ±0.5°水平面误(wù)差,确保水平扫描距离
- ● 最大40k/s点云密(mì)度(dù): 提(tí)供方位角、距离、反射强度等数据
- ● 用户可设定的弱信号阈值强(qiáng)度调整,应对差异化使用(yòng)场景
- ● 内置多级滤波算法,客户可按需设置,应对拖尾问题
- ● 出线:标准后出(chū)线,下出线方式可(kě)选
- ● 提供ROS驱动(dòng)
- ● 认证(zhèng):FCC,EMC,CE,RoHS,REACH,FDA
- ● 防护(hù)等级:IP66
应用:
|
|
|
|
|
|
|
| 自主移动机器人AMR |
|
工业自动化 |
|
主动(dòng)安全监控 |
|
智能物流 |
|
VF1-25系列 2D激光雷达传感器

特点:
- ● 适用(yòng)于(yú)SLAM导航以及点云避障策略
- ● 测距能力:25m@(R=80%),40m可选,>8m@(R=4%)
- ● 扫描范围:视场角(水平)360°,0.25°角分辨(biàn)率@10Hz
- ● 数据(jù)型及开关输出两种可选
- ● 专利光(guāng)路设计,可(kě)增强(qiáng)在雨水及罩(zhào)窗污染下的使用能力
- ● 抗阳光干扰能力≤120KLux;
- ● ESD等级达到(dào)Level4(ENIEC61000-4-2:2009)8KV接触放电(diàn);15KV空(kōng)气(qì)放电;
- ● 防护等级:IP67
应用(yòng):
|
|
|
|
|
|
|
| 自主移动机(jī)器人AMR |
|
工业自(zì)动化 |
|
主动安全监控 |
|
智能物流 |
|
LR-1F 2D激光雷达传感器

特点(diǎn):
- ● 适用于反光板导(dǎo)航和(hé)自然导航,可应对混(hún)合导航的应用需求
- ● 测距能力:50m@(R=80%)
- ● 扫描范围:视场角(水平)360°,最高0.06°角度分辨率
- ● ±0.5°水平面误差,确保(bǎo)水(shuǐ)平扫描(miáo)距离
- ● 60k/s点云密度:提供(gòng)方位角、距离、反射强度数据
- ● 高可靠性电机设计:应对高速(sù)及颠簸运行环境
- ● 提供(gòng)ROS驱动
- ● 出线:后出线
- ● 认证:FCC,EMC,CE,RoHS,REACH,FDA
- ● 防护等级:IP66
应(yīng)用:
|
|
|
|
|
|
|
| 自(zì)主(zhǔ)移动机(jī)器人AMR |
|
工业自动化(huà) |
|
主动安(ān)全监控 |
|
智能物(wù)流 |
|
GS1-5功能安全型激光雷达传感器

特点:
- ● 探测能力:最(zuì)大5m的安全保护区域,最远(yuǎn)20m的警告(gào)区(qū)域最小探测(cè)物直径≥20mm
- ● 配合OLEI专用配置软件使用(yòng),可(kě)对GS1-5进行多达32个区域的自由配置
- ● 符合IEC61508/IEC62061 SIL2安全等级标准
- ● 符合ISO13849 PLd安全等级标准
- ● 符(fú)合IEC61496 Type3安全性能要求
- ● 符合IEC60825 Class1激光安(ān)全等级标准(zhǔn)
- ● ESD等级:达到Level4 (IEC61000-4-2) 8KV接触放电,15K空气放电
- ● 防护等级:IP65
- ● 计划上市时间:2024年7月
应用:
|
|
|
|
|
|
|
| 自主移动(dòng)机器人AMR |
|
工业自动化 |
|
主动安全(quán)监控 |
|
智能物流 |
|
LR-16F 3D激(jī)光雷达传感器
特点:
- ● 适用于移动机(jī)器(qì)人自然导航,以及移动测绘MMS
- ● 测距能力:100m@(R=80%)
- ● 扫描范围:
- ○ 水平:视场角360°,分辨率0.18°±10%@10Hz
- ○ 垂直:视场角±15°,分辨率2°±0.1°
- ● 310K/s点云密度:提供(gòng)方(fāng)位角、距离、反射强度等数据
- ● 尺寸(cùn)更紧凑:97(D)×85.2(H)(mm)
- ● 创新的光学设计,产品一致性高
- ● 欧镭专利散热设计(jì),具有高(gāo)稳定(dìng)性以及优异的(de)高低温精度
- ● 出线:侧出(chū)线(xiàn),下出线可选
- ● 可接受客户定制:线数(4~16)、出(chū)线方式、防爆、防护等级
- ● 认证:FCC,EMC,CE,RoHS,REACH
- ● 防(fáng)护(hù)等(děng)级:IP66
应用:
|
|
|
|
|
|
|
|
 |
| 自主(zhǔ)移动机器人AMR |
|
工业自动化 |
|
主动安全监控 |
|
智能物流 |
|
移动测绘MMS |
|

摩尔芯光(LightIC)于2019 年成立,总部位(wèi)于(yú)北京。
公司拥有光子集成技术,致力于研发和生产基于硅光技术的激光(guāng)雷达(LiDAR)芯片及系统,并专注于下一代 FMCW 技术(shù)路线的激光雷达(dá)的整机开发及量产。
FMCW雷达因(yīn)具备强抗干扰性(xìng)、低功耗及高精度测(cè)距测速优势,广泛应用于(yú)汽车、无人机导航、工业自动化和航空航天等领域。
摩尔芯光已成功推出FMCW动态瞬识激光雷达系统LARK

LARK核心优势(shì):
- 1. 速度(dù)直接识别,节省算力投入
FMCW 天然技术优势,不用算(suàn)更快(kuài)捷不优化更真实
- 2. 测速范围(wéi)-240km/h~240km/h
测速范围覆盖更多探测对象,智能分辨正对(duì)向移动目标
- 3. 日夜畅行,光影无阻
激光探测不受环境明暗变换影响,适应多(duō)种环境要求
- 4. 46mm超纤体型
空间适配(pèi)性(xìng)更(gèng)高
- 5. 本振光1v1配对识别,抗干(gàn)扰
无惧激光雷达(dá)间对射
- 6. 速度精度0.03m/s~0.06m/s
超越传感器融合,更周全的安(ān)全保障
- 7. 动态ROI切(qiē)换
精准实时定位(wèi)及追(zhuī)踪移动目标
- 8. 230m@10%长距探测
超越人(rén)眼细微观(guān)察距离,让决策拥有更多(duō)安全反应时间
主要技术参数:
| 参数 |
指标 |
| 激光级别(bié): |
Class 1 |
| 测距范围: |
1~300m (200m @10%) |
| 测距准度 1σ: |
3cm |
| 测速范围: |
-240~240km/h |
| 测速精度: |
0.05 m/s |
| 盲区: |
~0.5m |
| 水平视(shì)场: |
120° |
| 水平分辨率: |
0.1° |
| 垂直视场: |
25° |
| 最(zuì)小垂直分辨率(lǜ): |
0.08° |
| 角度精度: |
0.05° |
| 帧(zhēn)率(fps): |
~10Hz |
| 回波模式: |
支持(chí)单回(huí)波 & 双回波 |
| 点频: |
1.5M/s(单回波),3M/s(双回波) |
| 传输方式: |
1000Mbps Ethernet over UDP connection |
| 时(shí)间同步: |
PTP |
尺寸
W*D*H(mm): |
206mm x 140mm x 46mm |
| 重量: |
1.9 Kg |
| 数据(jù)内容: |
时间戳,点位置信息,速(sù)度,反射率 |
| 电压范围: |
DC 9-32V |
| 功耗: |
~90W |
| 防护等级: |
IP67 |
| 工作温度: |
-20~65℃ |

芯探的Flash激光雷达具(jù)备测距能力长、抗干扰能力强、适合大规模量产等优势(shì),可以将更高效的感(gǎn)知能力赋予车辆、机器人、物联网、安防等行业,让人类生活更舒适高效。
产品特点:
- • 纯(chún)固态设计(jì):无移动机械部件,具有良好的耐用性和耐磨性(xìng)
- • 车(chē)规级:成熟的硅基半(bàn)导体工艺,可靠性(xìng)、一致性、稳定性有保(bǎo)障(zhàng)集成度高、结构简(jiǎn)单、故(gù)障率低,满足客户批(pī)量化需求
- • 针对大规模生产进行了优化:高集成度、简化(huà)结构
应(yīng)用(yòng)范围:
 |
 |
 |
| 体积测量 |
门禁(jìn)/安防 |
机器人(rén) |
| |
|
|
 |
 |
 |
| 辅助驾驶 |
智慧道(dào)路 |
无人车 |
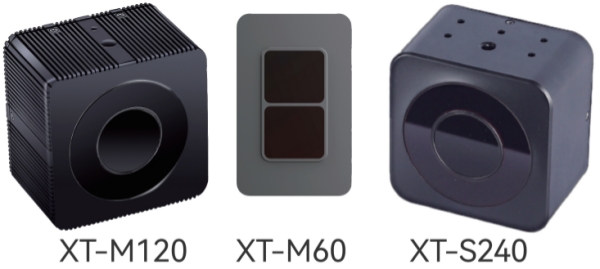
| 产(chǎn)品名(míng)称 |
S系列-工业级 |
| XT-S240 Mini |
XT-S240 Pro |
| 场景 |
低速 |
| FOV 图像视角 |
106° × 80° |
72° × 58° |
| 光波(bō)长 |
940 nm |
| 平均功率 |
6 W |
| 输出数据 |
3D点云、深度图像、反射(shè)率图、灰度图 |
| SDK |
C++ / Python / Linux / Ros1 & Ros2 |
| 准度 |
1% - 2% |
| 角分(fèn)辨(biàn)率 |
0.33°(H) × 0.33°(V) |
0.22°(H) × 0.24°(V) |
| 分(fèn)辨率 |
320 × 240 |
测试距离
50% 反射率 |
10 m 室外 |
15 m 室外 |
| 帧(zhēn)率(lǜ)(FPS) |
10 - 20 |
| 体积(jī)(mm) |
68 × 68 × 45 |
| 重量 |
198 g |
192 g |
| 电压 |
12 - 24V(DC) @ 3A |
| 工作(zuò)温度(dù) ℃ |
-20° to +60° |
| 产品名称(chēng) |
M系列-车规级 |
| XT-M120 Mini |
XT-M120 Pro |
XM-M120 Max |
XT-M60 |
| 场(chǎng)景 |
中速 |
中高速(sù) |
车载补盲(中(zhōng)低速) |
| FOV 图像(xiàng)视角 |
106° × 80° |
72° × 58° |
32° × 24° |
120° × 45° |
| 光波长 |
940 nm |
| 平均功(gōng)率 |
12 W |
6 W |
| 输出数据(jù) |
3D点(diǎn)云、深(shēn)度图(tú)像、反射率图、灰度图 |
| SDK |
C++ / Python / Linux / Ros1 & Ros2 |
| 准度 |
1% - 2% |
| 角分辨(biàn)率 |
0.33°(H) × 0.66°(V) |
0.22°(H) × 0.48°(V) |
0.1°(H) × 0.2°(V) |
0.75°(H) × 0.75°(V) |
| 分(fèn)辨率 |
320 × 120
|
160 × 60 |
测试(shì)距离(lí)
50% 反射率 |
20 m 室外 |
30 m 室外
|
80 m 室外
|
15 m 室外(wài)
|
| 帧率(lǜ)(FPS) |
10 - 50
|
1 - 30 |
| 体积(mm) |
72 × 72 × 48
|
65 × 35 × 45
|
| 重量 |
220 g
|
123 g |
| 电压 |
12 - 24V(DC) @ 3A 航空接口
|
12 - 24V(DC) @ 3A |
| 工作温度 ℃ |
-40° to +85°
|
说明(míng):
- 1. 具体测量量程受测量频率、光照(zhào)强度、目标反射率影响会有变(biàn)化(huà)。
- 2. 支持单次测量和连续测量,连续测量频率5Hz、10Hz、20Hz、30Hz可选。
- *本文件中出现的产品、规格(gé)和其他信息如有更改,科艺仪器恕不另行(háng)通知。
科艺仪器提供基于(yú)TOF, FMCW 及FLASH技术的2D,3D激光雷达,以满足不同应用的移动机器人及AI的开发需求。同时,我们也提供连续稳(wěn)定输(shū)出位姿信息(xī)的位算单元,助力泛移动机器(qì)人系统敏捷开发。
中德睿博(bó) - 助力(lì)泛移动(dòng)机器人(rén)系统敏捷开发
基于底层的(de)多传感器时间同步架构及多源数(shù)据技术,中德睿博为不同(tóng)需求的客户提供全场(chǎng)景定位的模块化标准产(chǎn)品(pǐn),包含:
- •L系列-持续稳定输出位置信息的(de)全源融合位算单元LCU
- •N系列-适用于不(bú)同类型移动机器人的系列(liè)化导航专用工控机NIPC
- •S系列-可以即插即用的全源时空融合敏捷开发平台 SLAM
欧(ōu)镭激光- 2D、3D ToF 激光雷达
欧镭激光提(tí)供面向工业和商业移动机器人的导航定位和(hé)避障用1D,2D,3D激光(guāng)雷达。
摩尔芯光 - FMCW 激光雷达
拥有(yǒu)自有知识产权的光子集成(chéng)技(jì)术,致力于研发(fā)和生产基于硅光技(jì)术的激光(guāng)雷达(LiDAR)芯片及系统,并专注于下一代 FMCW 技术路线的激光雷达的整机开发及量产。
芯探 - Flash 激光雷达
芯探的Flash激光雷(léi)达具备测距能力(lì)长、抗干扰能力强、适合大(dà)规模量产等优势(shì),可以将更高效的感知能(néng)力赋予车辆、机器人、物联网、安防等行业。
苏(sū)州中德睿博智能科技有限公司(sī)(Sino-German Robooster Intelligent Technology Co. Ltd)
由机器人与导航定位专业的留德博士(shì)于2015年创立,秉承“严谨、耐心、专业、精益求精”的工匠精神,以“让人工(gōng)智能‘慧’眼识(shí)途(tú)”为愿景,立志做全球的全(quán)场景定位解决方案供应商。团队深耕移(yí)动机(jī)器人及自主移动解决方案多(duō)年(nián),专注于多传感器信息(xī)融合、全源融合定位、即时成图与定(dìng)位(SLAM)、移动载体(tǐ)运(yùn)动测量等领域,集行(háng)业认知、核心技术、批量生产、供应链优(yōu)势于一身。
公司的主要产品包含:
时(shí)间同步器(RS-TS5)
RS-TS5可基(jī)于外部1PPS 或者内部时钟,实现8通道的同步触发信号生成。8个通道之间、8个通道与外部 1PPS之间的同步精(jīng)度达到µs级,当外部 1PPS 无效时(shí),可自动切换(huàn)为外部(bù)基(jī)准。8个通道参数可通过串口单独配置,配置参数(shù)包括输(shū)出频率、输出占空(kōng)比和输出有效电平。
特点:
- • 同步精度高、同步延迟小
- • 输入输出脉(mò)冲参数通串口可调
- • 同时支持八路信号同步
- • 同时支持(chí)内部、外部脉冲触发,无外部脉冲(chōng)时自动切换内部脉冲触发
- • 低频率误差,误差不大于 10PPM
- • 同步精度优于 5us
组合导航及(jí)外(wài)同步模块与组(zǔ)合导航基站(RS-INTS1、RS-INTB1)
RS-INTS1组(zǔ)合(hé)导航及外同步模块内部集成双天线差分GNSS模块、3轴陀螺、3轴加速度计(jì)、3轴磁强计以及气压计,内部传感器采样时严格与1PPS 同步,同时将GNSS 的1PPS 作为输入,可以根据用(yòng)户配置(zhì)的频率,生成并输出与1PPS同步的最(zuì)多6路同步信号,用来给用户的其他设备(bèi)提供触发信号,6 路(lù)同步信号的频率、占空比等(děng)均单独可配置。组合导航及外同步模块内部集成4G模块,与RS-INTB1组合导航基站模块(kuài)配对使用(yòng),上电自动与组合导航基站模块通信,实现上电即可高精度 RTK 定位。双(shuāng)天(tiān)线差分 GNSS 模块同时可为用户提(tí)供高精度的方位输出。RS-INTS1亦支持千寻数据的(de)RTK,无需复杂操作,客户端输入千寻账号后,即可一键RTK。
特点:
- • 内部集(jí)成双天线差分 GNSS 模块
- • 内(nèi)部集成(chéng)高性能 MEMS-IMU
- • 内部集成 3 轴磁强计和气(qì)压计
- • 内部传感器数据采集(jí)完全与 1PPS 同步
- • 6 通(tōng)道同步触发信号输出
- • 同步(bù)信号的频率、触发偏移、有效电平、占空(kōng)比等(děng)参数可独立配置(zhì)
- • 外部秒脉冲(chōng) / 内部秒脉冲模式(shì)
- • 提供 ROS 驱动
多源(yuán)融(róng)合同步采(cǎi)集设备(RS-SLAMBase/RS-SLAMBasePro)
SLAM Base多源融合同步采集设备采用高性(xìng)能ARM多核处理器,内部集成双天线差分GNSS模块、3轴陀螺、3轴MEMS加速度计、3轴磁强计以及气压(yā)计,内部传感器(qì)采样与1PPS同步,同时将GNSS的1PPS作为输(shū)入,可以根据(jù)用户配置(zhì)的频率,生成并输(shū)出与1PPS同步的最(zuì)多4路同步信号,用来给用户的(de)其他传感器提供触发信号,是SLAM及三维维重构研究的理(lǐ)想同步采集平台。
特(tè)点:
- • 所(suǒ)有传感(gǎn)器数据通过(guò) 1PPS 信号进(jìn)行硬同步,即使在没有 GNSS 信(xìn)号下也能通过内置(zhì)触发信号进行同步
- • 基站差分数据或者千寻数据(jù)输入,实现双天线(xiàn) RTK 定(dìng)位
- • 4通道(dào)同步触发信号输出,可触发(fā)用户配置的其他传感器
- • 同步(bù)信号的频率、触发偏移、有效电平、占空比等参(cān)数可(kě)独立配置
- • 集成4G通讯,一键(jiàn)RTK定位(选配配对(duì)基站)
多源融合定(dìng)位与建图装置(RS-SLAMPlus/RS-SLAMPlusPro)
SLAM Plus全源(yuán)融合定位建图设备是(shì)一款高度(dù)集成的高性能感知设备,融合了先进的传感器技术和时间同步机制。该设备内部集成四目环视相机(jī)、激光雷达(dá)、双天线差分GNSS模块、3轴陀螺、3轴MEMS加速(sù)度计、3轴磁强计以及气(qì)压计,内部传感器采样严格与1PPS(Pulse Per Second)同步,所有传感器数据采用ROS节点方式输出,所有数据接(jiē)口均采用带锁扣连(lián)接器,更适合移动载体。SLAM Plus为多传感器融合、SLAM、测(cè)绘三维建(jiàn)模及全源融合(hé)导(dǎo)航研究者提供了一个强大(dà)即插即用的解决方案,是当今头部的感知测量和全源融合导航开发平台。
特点:
- • 内部集成多线激光雷达
- • 内部集成(chéng)4目环视相机;
- • 内部集成双天线(xiàn)差分GNSS模块;
- • 内部(bù)集(jí)成高性(xìng)能MEMS-IMU;
- • 内部集成3轴磁强计和气压计;
- • 内部传感器数据采集(jí)完全与1PPS同步;
- • 输出同步采集的所有传感器原始数据;
- • 集成4G通(tōng)讯,一键RTK定位(选配配对基站)
简介:
- ● 欧镭激光于2016年在杭州(zhōu)成立,隶属杭州巨星科技(002444);在巨星科技担当光电核心器件的设计、研(yán)发和制造的角色;
- ● OLEI拥有90多名(míng)拥有光、机(jī)、电及测量(liàng)测绘仪器行业经验的专业成员;其中包含(hán)一支成(chéng)熟稳定的(de)制造团队。
产(chǎn)品:
欧镭激光提供面向工业和商业移动机器人的导航定位和避障用1D,2D,3D激光雷达。
A090/A200 1D激光测(cè)距传感器
特点:
- ● 长量程:0.05-90/200m(自然目标)2个版本可选
- ● 高精度:±1.5mm
- ● 高分(fèn)辨率:0.1mm
- ● 高速度(dù):最高30Hz
- ● 抗强光:<30klux
- ● 接口丰富:RS485,CAN,模拟量、1路开关(guān)量输入、2路开(kāi)关量输出(chū)
- ● 工作温度(dù):-20~+55℃
应用:
- ● 集装箱定(dìng)位
- ● 定位小推车和平移车
- ● 大型工件装配定位(wèi)
- ● 材料切割过(guò)程中的长度测量
- ● 起重机/龙门吊的碰撞保护
- ● 江河湖海的水位测量
LR-1BS2 2D激光雷达传感器
特点:
- ● 适用于安全避障及(jí)区域防护
- ● 探测能力可达(dá)20m@(R=80%)
- ● 开(kāi)关量推挽输出,同时兼带点云数据(可单控PLC也可做点云避障策略)
- ● 扫描能(néng)力:视场角(水平)270°;0.225°固定角分辨率
- ● ±0.5°水平面误差,确保水平扫描距离
- ● 可自由设置安全区域,最多16个BANK
- ● 标准出线侧面,其他方(fāng)式(shì)可选
- ● 提供ROS驱动
- ● 认证:FCC,EMC,CE,RoHS,REACH,FDA
- ● 防(fáng)护等级:IP66
应用:
|
|
|
|
|
|
|
| 自主移动机器人AMR |
|
工业自(zì)动化 |
|
主动安(ān)全监控 |
|
智能物(wù)流(liú) |
|
LR-1BS5 2D激光雷达传感器(qì)
特点:
- ● 适用于SLAM导航以及点(diǎn)云避(bì)障策(cè)略
- ● 测(cè)距能力:25m@(R=80%),30m可选
- ● 扫描范围:视场角(水平)270°,0.225°固定(dìng)角分辨率(lǜ)
- ● ±0.5°水平(píng)面误差,确保(bǎo)水平扫描距离
- ● 最大40k/s点云密(mì)度: 提供方位角、距离、反射强度等(děng)数据
- ● 用户可设定的弱信号阈值强度调整,应(yīng)对差异化使用场景
- ● 内置多(duō)级滤波算法(fǎ),客户可按需设置,应对拖尾(wěi)问题
- ● 出线:标准后出线,下(xià)出线方式可选
- ● 提供ROS驱动
- ● 认证(zhèng):FCC,EMC,CE,RoHS,REACH,FDA
- ● 防护等级:IP66
应用:
|
|
|
|
|
|
|
| 自主移动机(jī)器人(rén)AMR |
|
工业自动化 |
|
主(zhǔ)动安全监控 |
|
智能物流 |
|
VF1-25系列(liè) 2D激光雷达传感器
特点:
- ● 适用于SLAM导航以及点云避障策略
- ● 测距(jù)能力:25m@(R=80%),40m可选,>8m@(R=4%)
- ● 扫描范围:视场角(水平)360°,0.25°角分辨率@10Hz
- ● 数据型及开关输出两种可选
- ● 专利光路设计,可增(zēng)强(qiáng)在雨水及罩(zhào)窗污染下的使(shǐ)用能力
- ● 抗阳光干扰能力≤120KLux;
- ● ESD等级达到Level4(ENIEC61000-4-2:2009)8KV接触(chù)放电;15KV空气放电;
- ● 防护(hù)等级:IP67
应用:
|
|
|
|
|
|
|
| 自主移动机器人AMR |
|
工业自动化 |
|
主(zhǔ)动安全监(jiān)控 |
|
智能物流 |
|
LR-1F 2D激光雷达传感(gǎn)器
特点:
- ● 适用于反光板导航和自然(rán)导航,可应对混合导航的应用需求
- ● 测距(jù)能力:50m@(R=80%)
- ● 扫描范围:视场角(水(shuǐ)平)360°,最高0.06°角度分(fèn)辨(biàn)率
- ● ±0.5°水平面误差,确保(bǎo)水平扫描距离
- ● 60k/s点云密度:提供方位角、距离、反射强度数(shù)据
- ● 高可靠性电机设计:应对高速及颠(diān)簸运行环境
- ● 提(tí)供ROS驱动
- ● 出线:后出线
- ● 认证:FCC,EMC,CE,RoHS,REACH,FDA
- ● 防护等级:IP66
应用:
|
|
|
|
|
|
|
| 自主移动机器(qì)人AMR |
|
工业自动(dòng)化 |
|
主动安全监(jiān)控 |
|
智能物(wù)流 |
|
GS1-5功能(néng)安全型激光雷达(dá)传感器
特点:
- ● 探测能力:最大5m的安全保护区域,最远20m的警告区域最(zuì)小探测物直径(jìng)≥20mm
- ● 配合OLEI专用配置软件使用,可对GS1-5进行多达32个区域的(de)自由配置
- ● 符合IEC61508/IEC62061 SIL2安全等级标准
- ● 符(fú)合ISO13849 PLd安全等级标准
- ● 符(fú)合IEC61496 Type3安全性能要求
- ● 符合IEC60825 Class1激(jī)光安全等级标准
- ● ESD等级:达到Level4 (IEC61000-4-2) 8KV接触放电,15K空气放电(diàn)
- ● 防护等级:IP65
- ● 计划上市时间:2024年7月(yuè)
应用:
|
|
|
|
|
|
|
| 自(zì)主移(yí)动机器(qì)人AMR |
|
工(gōng)业自动化 |
|
主动安全监控 |
|
智能物流 |
|
LR-16F 3D激光雷达传感器
特点:
- ● 适用于移动机器人自(zì)然导航,以及移动(dòng)测绘MMS
- ● 测距能力:100m@(R=80%)
- ● 扫描范围:
- ○ 水(shuǐ)平(píng):视场角360°,分辨率0.18°±10%@10Hz
- ○ 垂直:视(shì)场角±15°,分辨率2°±0.1°
- ● 310K/s点云密(mì)度:提供方位角、距离、反射强度等数据
- ● 尺寸更紧凑:97(D)×85.2(H)(mm)
- ● 创新的光(guāng)学设计,产品一(yī)致性高
- ● 欧镭专利散热设计,具有高稳定性以及优异的高低温精(jīng)度
- ● 出线(xiàn):侧(cè)出线,下出(chū)线可选
- ● 可接受客户定制:线(xiàn)数(4~16)、出线方式、防爆、防护等级
- ● 认证:FCC,EMC,CE,RoHS,REACH
- ● 防护(hù)等级:IP66
应用(yòng):
|
|
|
|
|
|
|
|
|
| 自主移(yí)动机器人AMR |
|
工业自动化 |
|
主动安全监(jiān)控 |
|
智(zhì)能物流 |
|
移(yí)动(dòng)测绘MMS |
|
摩尔芯光(LightIC)于2019 年成立,总部位于北京。
公司拥有光子集成技术,致力于研(yán)发和生产基于硅(guī)光技术的激光雷达(LiDAR)芯片及系统,并专注于(yú)下一代 FMCW 技术路线(xiàn)的激光雷达的整机开(kāi)发及(jí)量产。
FMCW雷达因具备强抗干扰性、低(dī)功耗及高精度测距测速优势,广泛应用(yòng)于汽车、无人机导航、工业自动化和航空航天等领域。
摩尔芯光已成功推出FMCW动(dòng)态瞬识激光雷达系统LARK
LARK核心优(yōu)势:
- 1. 速度直接识别,节省算力投入
FMCW 天然技术优势,不用算更快捷不优化更真实
- 2. 测速范围-240km/h~240km/h
测速范围覆盖更多探测对象,智能分辨正对向移动目标
- 3. 日夜畅行,光影无阻
激光探测不受环(huán)境明暗变换(huàn)影响,适应多种环境要求
- 4. 46mm超纤体型
空间适(shì)配(pèi)性更高
- 5. 本振光(guāng)1v1配对识别(bié),抗干扰
无惧激光雷达间对射
- 6. 速(sù)度精度0.03m/s~0.06m/s
超越传感器(qì)融合(hé),更周全的安全(quán)保障
- 7. 动态ROI切换
精准(zhǔn)实时定位及追(zhuī)踪移动目标
- 8. 230m@10%长距探测
超越人眼细微观察距离,让决策拥有更多安全反应时间
主要技术参数:
| 参数 |
指(zhǐ)标 |
| 激光级别: |
Class 1 |
| 测距范围: |
1~300m (200m @10%) |
| 测距准度(dù) 1σ: |
3cm |
| 测速范围: |
-240~240km/h |
| 测速精度: |
0.05 m/s |
| 盲区: |
~0.5m |
| 水平视场(chǎng): |
120° |
| 水平分辨率: |
0.1° |
| 垂直视场: |
25° |
| 最(zuì)小垂直分辨率: |
0.08° |
| 角(jiǎo)度精度: |
0.05° |
| 帧率(fps): |
~10Hz |
| 回波模式: |
支持单回波 & 双(shuāng)回波 |
| 点频: |
1.5M/s(单(dān)回波),3M/s(双(shuāng)回波) |
| 传输方式: |
1000Mbps Ethernet over UDP connection |
| 时(shí)间同步: |
PTP |
尺寸
W*D*H(mm): |
206mm x 140mm x 46mm |
| 重量: |
1.9 Kg |
| 数据内容: |
时间戳,点位置信息(xī),速度,反射率 |
| 电压范围: |
DC 9-32V |
| 功耗: |
~90W |
| 防护等级: |
IP67 |
| 工作温度: |
-20~65℃ |
芯探的(de)Flash激光雷达具备测距能力长(zhǎng)、抗干扰能力(lì)强、适合大(dà)规(guī)模量产等优势,可以将更高效的感知能力赋予车(chē)辆(liàng)、机器人、物联网、安防等(děng)行业,让人类生活更舒适高效。
产品特点:
- • 纯固态设计:无移动机械部件,具有良好的耐用性和耐磨性
- • 车规级:成(chéng)熟(shú)的(de)硅基半导体工艺(yì),可靠性(xìng)、一致性、稳定性(xìng)有保障集成度(dù)高、结构简单(dān)、故障率低,满(mǎn)足客户批量化需求
- • 针对大规(guī)模生产进行了优化:高集成度、简化(huà)结构
应用(yòng)范围:
|
|
|
| 体(tǐ)积测量 |
门禁/安防 |
机器人 |
| |
|
|
|
|
|
| 辅助驾驶 |
智慧道路 |
无人车 |
| 产品名(míng)称 |
S系(xì)列(liè)-工业级 |
| XT-S240 Mini |
XT-S240 Pro |
| 场景 |
低速 |
| FOV 图像视角 |
106° × 80° |
72° × 58° |
| 光波长 |
940 nm |
| 平均功率 |
6 W |
| 输出数据 |
3D点云、深(shēn)度图(tú)像、反射(shè)率图、灰度图(tú) |
| SDK |
C++ / Python / Linux / Ros1 & Ros2 |
| 准度 |
1% - 2% |
| 角分(fèn)辨率 |
0.33°(H) × 0.33°(V) |
0.22°(H) × 0.24°(V) |
| 分辨率 |
320 × 240 |
测试距离(lí)
50% 反射率(lǜ) |
10 m 室外 |
15 m 室外 |
| 帧率(lǜ)(FPS) |
10 - 20 |
| 体积(mm) |
68 × 68 × 45 |
| 重量 |
198 g |
192 g |
| 电压 |
12 - 24V(DC) @ 3A |
| 工作温度 ℃ |
-20° to +60° |
| 产品名称 |
M系列-车规级 |
| XT-M120 Mini |
XT-M120 Pro |
XM-M120 Max |
XT-M60 |
| 场景 |
中速 |
中高速 |
车载补盲(中低速) |
| FOV 图像视角 |
106° × 80° |
72° × 58° |
32° × 24° |
120° × 45° |
| 光波长 |
940 nm |
| 平均功率 |
12 W |
6 W |
| 输出数(shù)据 |
3D点云、深度图像(xiàng)、反射率图、灰度图 |
| SDK |
C++ / Python / Linux / Ros1 & Ros2 |
| 准度 |
1% - 2% |
| 角分(fèn)辨率 |
0.33°(H) × 0.66°(V) |
0.22°(H) × 0.48°(V) |
0.1°(H) × 0.2°(V) |
0.75°(H) × 0.75°(V) |
| 分辨率 |
320 × 120
|
160 × 60 |
测试距离
50% 反射率 |
20 m 室外 |
30 m 室外
|
80 m 室外
|
15 m 室(shì)外
|
| 帧率(FPS) |
10 - 50
|
1 - 30 |
| 体积(mm) |
72 × 72 × 48
|
65 × 35 × 45
|
| 重量 |
220 g
|
123 g |
| 电压 |
12 - 24V(DC) @ 3A 航(háng)空(kōng)接口
|
12 - 24V(DC) @ 3A |
| 工作温度 ℃ |
-40° to +85°
|
说明:
- 1. 具体测量量程受测量频率、光(guāng)照强度、目标反射率影响会有变(biàn)化。
- 2. 支持单次测(cè)量和连续测量,连续测量频率5Hz、10Hz、20Hz、30Hz可选。
- *本文件中出现的产品、规格和其他信息如(rú)有更改,科艺仪器恕不另行通知。